

elistechnology
Well-Known Member
2.5in on checkpoints, we are getting close... 
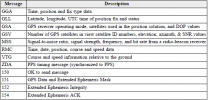
Corrections from base to rover when using Ntrip connection are defined by RTCM protocol:
RTCM Rev3 Common Message Types
Most common message used for >90% of all RTK applications
1004 Extended L1&L2 GPS RTK Observables for GPS RTK Use, the main msg X
1005 Stationary RTK Reference Station ARP X
1006 Stationary RTK Reference Station ARP plus the Antenna Height X
1007 Antenna Descriptor (msg 1008 (X) is also commonly used) X
1012 Extended L1&L2 GLONASS RTK Observables, the other main msg X
1013 System Parameters, time offsets, lists of messages sent
1017 GPS Combined Geometric and Ionospheric Correction Differences
1019 GPS Broadcast Ephemeris (orbits) X
1020 GLONASS Broadcast Ephemeris (orbits) X
1029 Unicode Text String (used for human readable text)
1033 Receiver and Antenna Descriptors
1045 Galileo Broadcast Ephemeris
Most of survey grade recivers work in WGS84 + elipsoid as native (reciver send it to controller), software on controller transforms it to datums set by user. That's defined by NMEA protocol (GLL message).
Corrections from base to rover when using Ntrip connection are defined by RTCM protocol:
RTCM Rev3 Common Message Types
Most common message used for >90% of all RTK applications
1004 Extended L1&L2 GPS RTK Observables for GPS RTK Use, the main msg X
1005 Stationary RTK Reference Station ARP X
1006 Stationary RTK Reference Station ARP plus the Antenna Height X
1007 Antenna Descriptor (msg 1008 (X) is also commonly used) X
1012 Extended L1&L2 GLONASS RTK Observables, the other main msg X
1013 System Parameters, time offsets, lists of messages sent
1017 GPS Combined Geometric and Ionospheric Correction Differences
1019 GPS Broadcast Ephemeris (orbits) X
1020 GLONASS Broadcast Ephemeris (orbits) X
1029 Unicode Text String (used for human readable text)
1033 Receiver and Antenna Descriptors
1045 Galileo Broadcast Ephemeris
Most of survey grade recivers work in WGS84 + elipsoid as native (reciver send it to controller), software on controller transforms it to datums set by user. That's defined by NMEA protocol (GLL message).
Attachments

Last edited:

")

