- Joined
- Nov 11, 2021
- Messages
- 76
- Reaction score
- 50
- Age
- 56
Hi folks,
I am actually an Autel Robotics Newbie but in the pro drone business since 2015.
For some weeks now I am checking out "virtually" the capabilities of the EVO 2 Enterprise with RTK module and the DUAL 640 T camera by gathering information over the internet, contacting vendors and travelling to fairs etc.. Especially the possibility to make IR and RGB mappings during single flight RTK-missions (with high accuracy and minimized side overlaps) was fascinating me.
Yesterday I got very amazing results from an Italian vendor. Here is my post from the DD forum of which I think will be very interesting for many people on this dedicated product forum:
(...)
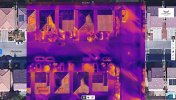
the vendor from Italy sent me this early afternoon (CET) a video link of the results of his RGB+IR RTK mapping test, he did this morning. He meanwhile switched it to his channel as official content. So here is the link, you will all be surprised (English):
EVO2 Enterprise DUAL 640T RTK evidence of thermal jpg coordinates were corrected via NTRIP
And this evening (CET) he published a second video showing the whole “making of” the map including the on site flight mission (windy day), processing (IR only) and the quality report. Again, the outcomes are quite amazing and should work with all mapping platforms at this high quality (Italian):
EVO2 Enterprise DUAL 640T RTK - modello fotogrammetrico di un termogramma accurato a 8mm
(...)
IR GSD=3.78 cm/px and RGB GSD=1.39 cm/px!
I read in the DD forum that photo resolution could not be switched to 8000x6000 px within missions for mapping flights. Only 4000x3000 px would be selectable here. Is that true?
The above mentioned mission was flown at 40 m AGL, what would actually have resulted in a GSD of approx. only 3 cm/px when jpegs with 4000x3000 px (12MP) would have been generated from the 640T's RGB 48 MP sensor.
The resulting RGB map having a GSD of 1.39 cm would mean that the 48MP camera did in fact twice as good as a 12 MP would have done. The sensor comes very close to a 20MP resolution but is under the GSD that would be expected from a 48 MP sensor.
So actually RGB GSD is no real showstopper and the overall results are really amazing.
What do you guys think?
I am actually an Autel Robotics Newbie but in the pro drone business since 2015.
For some weeks now I am checking out "virtually" the capabilities of the EVO 2 Enterprise with RTK module and the DUAL 640 T camera by gathering information over the internet, contacting vendors and travelling to fairs etc.. Especially the possibility to make IR and RGB mappings during single flight RTK-missions (with high accuracy and minimized side overlaps) was fascinating me.
Yesterday I got very amazing results from an Italian vendor. Here is my post from the DD forum of which I think will be very interesting for many people on this dedicated product forum:
(...)
the vendor from Italy sent me this early afternoon (CET) a video link of the results of his RGB+IR RTK mapping test, he did this morning. He meanwhile switched it to his channel as official content. So here is the link, you will all be surprised (English):
EVO2 Enterprise DUAL 640T RTK evidence of thermal jpg coordinates were corrected via NTRIP
And this evening (CET) he published a second video showing the whole “making of” the map including the on site flight mission (windy day), processing (IR only) and the quality report. Again, the outcomes are quite amazing and should work with all mapping platforms at this high quality (Italian):
EVO2 Enterprise DUAL 640T RTK - modello fotogrammetrico di un termogramma accurato a 8mm
(...)
IR GSD=3.78 cm/px and RGB GSD=1.39 cm/px!
I read in the DD forum that photo resolution could not be switched to 8000x6000 px within missions for mapping flights. Only 4000x3000 px would be selectable here. Is that true?
The above mentioned mission was flown at 40 m AGL, what would actually have resulted in a GSD of approx. only 3 cm/px when jpegs with 4000x3000 px (12MP) would have been generated from the 640T's RGB 48 MP sensor.
The resulting RGB map having a GSD of 1.39 cm would mean that the 48MP camera did in fact twice as good as a 12 MP would have done. The sensor comes very close to a 20MP resolution but is under the GSD that would be expected from a 48 MP sensor.
So actually RGB GSD is no real showstopper and the overall results are really amazing.
What do you guys think?
Last edited: