

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
EVO PRO 2, is my new go to mapping drone and yes over the P4Pv2
- Thread starter jmason702
- Start date
I was entertaining a modified X4S (precise trigger with M2) to use with Reach M2 onboard an I2 or M210... or direct M2 interface with a A7Riii under a M600Pro... maybe a A7Riii and the newer LIDAR a dual setup under M600Pro with the Reach M2.
Full Version trial - 30 day per email address.
Another local drone service provider and I are working on a project to build a lidar system using the Livox Mid-40 With a Manifold 2 and a handful of other components + a DSLR to color the point clouds. Are you working with that lidar sensor or maybe the Velodyne puck?
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
I haven't started beyond examination & serious thoughts on the Lidar... I lack the Lidar system. I have the platforms (I2, M210, M600Pro, etc). I was looking at the Livox models that GreenValley have integrated into packages. These are the same that DJI is now showing on their Web site.
Actually, up until recently Lidar was out of reach for my low volume needs, but these new kits are within reach and renewed my interest.
 www.livoxtech.com
www.livoxtech.com

 greenvalleyintl.com
They have the Livox 40 packed up into a "LiAir V" that a M210, M600 can mount.
greenvalleyintl.com
They have the Livox 40 packed up into a "LiAir V" that a M210, M600 can mount.
They also offer larger brands & models in pre-package kits.
The LiAir V is using the Livox Mid advertised on DJI Site

 store.dji.com
The Livox Mid is the smaller of the 3 listed on DJI. I've inquired with GreenValley if they integrate the other models and if need to be M600Pro platform. The M210 via a few YouTube appears to be a bit nose heavy with the LiAir V, they state it flys great but it is at the upper limit for payloads.
store.dji.com
The Livox Mid is the smaller of the 3 listed on DJI. I've inquired with GreenValley if they integrate the other models and if need to be M600Pro platform. The M210 via a few YouTube appears to be a bit nose heavy with the LiAir V, they state it flys great but it is at the upper limit for payloads.
The M210 supports Dual Gimbal mounts, so I was wondering is a light X4S could be included or exceeds payload.
I'm in the MidWest (Iowa) so I'm more focused on Ag and Construction, but the Lidar could expand that to other forms of inspection too.
Actually, up until recently Lidar was out of reach for my low volume needs, but these new kits are within reach and renewed my interest.
Livox LiDAR Sensors - For massive industrial applications
Livox is committed to accelerating the autonomous world by unlocking the full potential of LiDAR technology. With a line of advanced LiDAR sensor units, we offer companies and developers a reliable route for incorporating this technology into their projects and platforms.
LiAir Series - UAV Drone LiDAR Mapping Systems - GreenValley International
LIAIR SERIES UAV LiDAR SYSTEM Sample Data Knowledge Base Videos LiAir V Articles LiAir Series LiAir V70 With high flexibility (can be mounted on both DJI M200, DJI M210, DJI M300 and DJI M600 Pro) and powered by Livox AVIA, LiAir V70 can provide high-accuracy point cloud for the users in...
greenvalleyintl.com
They also offer larger brands & models in pre-package kits.
The LiAir V is using the Livox Mid advertised on DJI Site
DJI Store - category
Online shopping for a great selection of at the official DJI Online Store.
The M210 supports Dual Gimbal mounts, so I was wondering is a light X4S could be included or exceeds payload.
I'm in the MidWest (Iowa) so I'm more focused on Ag and Construction, but the Lidar could expand that to other forms of inspection too.
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
Little aged... but great article of interest

 www.commercialuavnews.com
www.commercialuavnews.com
Figuring Out Aerial Surveying with a Drone Instead of Arguing About Photogrammetry vs LiDAR
Surveying & mapping professionals have been using both photogrammetry and LiDAR for measurement and survey purposes for a long time now. As such, the question about which is more effective has co
www.commercialuavnews.com
Wow, your ortho and model came out fantastic. Do you know if Drone Deploy is still using the Pix4D engine? It seems like they either moved on or have tweaked. Last year when I would run the same data sets in Pix4D desktop, Pix4D cloud and Drone Deploy, the 3D models were very similar. Now it looks like Drone Deploy has taken a big lead in 3D models.
After seeing your impressive results in regards to the house with the clay tiles, I ran a data set in Drone Deploy, Pix4D desktop and Cloud. The Drone Deploy 3D model was very good, the Pix4D desktop was decent and the Pix4D Cloud was unusable garbage.
I will make my own thread and post the results. I just want to also use Agisoft Metashape as well.
After seeing your impressive results in regards to the house with the clay tiles, I ran a data set in Drone Deploy, Pix4D desktop and Cloud. The Drone Deploy 3D model was very good, the Pix4D desktop was decent and the Pix4D Cloud was unusable garbage.
I will make my own thread and post the results. I just want to also use Agisoft Metashape as well.



Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
That would be RealityCapture by CaptureReality.Thanks, I am pretty sure they moved on from PIX4D, last I herd. I hear Context Capture is the one to be checking out.... not Agisoft
And Yes, it does a beautiful job, many features and has a new purchase method.
Can Own outright with yearly support, or can purchase PPI credits that are used only when you need to move your images outside of RealityCapture. The other nice thing is that the image credit is applied once, no matter how many times you use the image in various projects, reports, etc.
They now offer a very sweet rapid image alignment and map overlay to inspect your collection prior to leaving site. If holes or gaps, you can re-fly various sections and “add” the additional images without needing to resubmit the whole set of images. Others offer similar but this one works very smoothly.
I’ll upload a Metashape, MapsMadeEasy and RealityCapture of same construction site for a comparison. You can clearly see the RealityCapture improvment over others.
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
Not home yet to access files... but on a similar discussion...
Comparing Metashape with OpenDroneMap and Cloud based ODMshape on the below CommercialDronePilots Link.
Scroll down a few posts for a few comparison pics.
 commercialdronepilots.com
commercialdronepilots.com
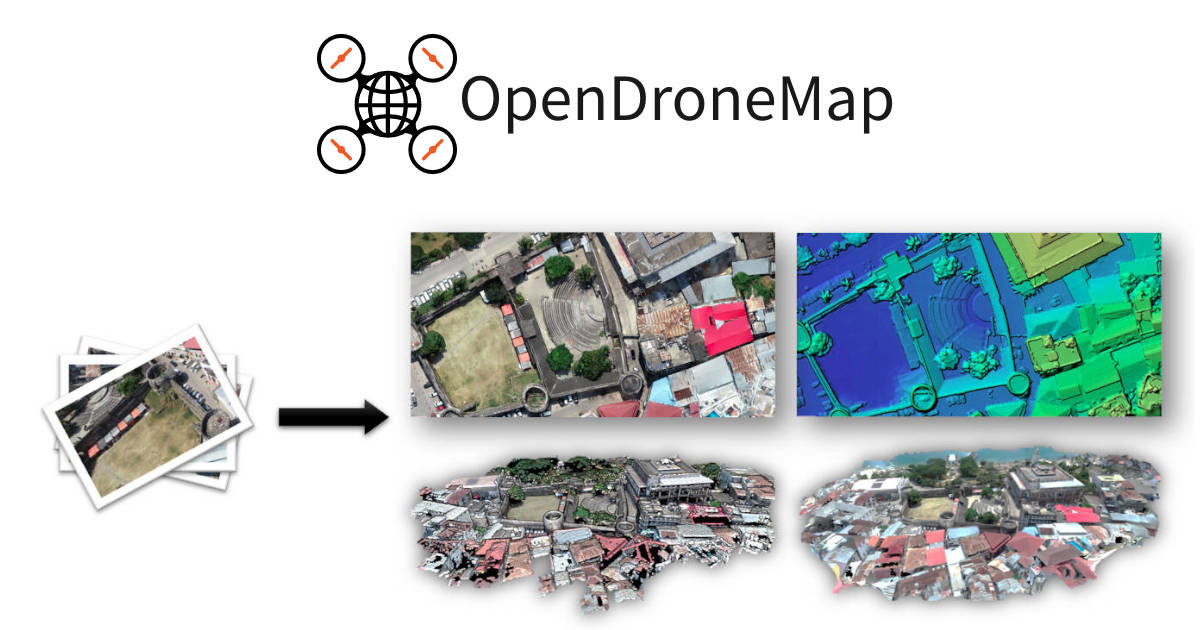
 www.opendronemap.org
www.opendronemap.org
 webodm.net
webodm.net
I'm not a RealityCapture User... I'm playing with it in spare time.
But the little I've used without setting basically any variable, it comes out very nicely.
One of the areas I've been particularly impressed is the 3D imaging when collecting Nadir images for 2D Ortho.
When no attempt is made to capture under or inside an object, it actually does a marginally good job for a little depth.
In comparison, Metashape if all Nadir has a difficult time showing any detail under or within a structure.
Comparing Metashape with OpenDroneMap and Cloud based ODMshape on the below CommercialDronePilots Link.
Scroll down a few posts for a few comparison pics.
Mapping Software
Hello I have been getting into mapping properties (around 200 Images) but am having trouble finding software to stitch them together. I’ve tried agisoft which works great but is very expensive. I’ve been using DJI groundstation to plan the missions which works great also, but it’s map stitching...
commercialdronepilots.com
Drone Mapping Software - OpenDroneMap™
Drone mapping software. Generate maps, point clouds, 3D models and DEMs from images, any orientation, any camera.
WebODM Lightning: Drone Mapping Software
Truly awesome drone mapping software. Generate accurate maps, elevation models, 3D models and point clouds from aerial images.
I'm not a RealityCapture User... I'm playing with it in spare time.
But the little I've used without setting basically any variable, it comes out very nicely.
One of the areas I've been particularly impressed is the 3D imaging when collecting Nadir images for 2D Ortho.
When no attempt is made to capture under or inside an object, it actually does a marginally good job for a little depth.
In comparison, Metashape if all Nadir has a difficult time showing any detail under or within a structure.
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
Little Informal Comparison... 1) Metashape [MS], 2) CaptureReality [CR] and 3) MapsMadeEasy [MME].
Exact same file set of images... 302 from a X4S I2 @ f11 (X4S is same camera on P4P, Mech Shutter up to 1/2000/s )
I own neither of the 2 programs, both are local installed. Exploring CaptureReality, purchased 30,000 PPI credits, and understood that provided a 'Fully' Functional version, but I've noticed the 2D Ortho have a "watermark" plastered all over, and the 3D model does not. Still exploring. The MetaShape, using a 30 day Full Functional Eval (each system can get a 30 day)
Things I've noticed: Detail of 2D is currently MS, but CR may have much more to tap once I learn more. It hints of much greater detail. The Color and EV & Contrast of CR is much better. The shadows, and overall brightness provide greater detail.
The blend of multiple photos and removing artifacts, moving objects (cars & people) are cleanly removed in CR, and removed Partially in MS.
Hole Filing is better in MS, but that is most likely me not knowing CR too.
On the 3D models... Both are auto mode, no tweaks or adjustments.
This is one area I felt was much stronger on CR, the NADIR shots normally give poor 3D results for any 1) Overhang, 2) Long non-color changing verticals, 3) narrow objects (ladders, cranes arms, etc), 4) vertical holes.
The lack of detail under overhangs is common in all the ones I've experimented with so far... but the CR is a few notches up. It's not useable detail, but it makes the biggest attempt to provide detail.
Example: 3D, look at the 2nd Floor foundation and the 1st Floor underneath. MS is a gapping unfilled hole. CR captures the first 2-4 feet under the overhang.
TIME to process -
On a Mac Pro 5,1 Dual Xeon 3.46 Mhz 6 Core / 24 thread processing, 128 GB RAM, GPU 1080Ti 12GB, Windows 10 v2004.
MME returns a completed message on avg for 280-350 photos in about 5-7 hrs.
MS 300 photo avg, takes about 5-6 hrs to process. (this project 5 hrs)
CR 300 photo avg, takes about 1-3 hrs to process. (this project 1 hr)
Metashape 2D -

CaptureReality 2D -

MapsMadeEasy -

MS 3D Model -

CR 3D Model -

Didn't grab a close up of CR, but examine the detail of MS close up on 2D...
This is the same 2D Ortho as the MS 2D at the top this stack of pics.
Locate the Crane shadow and stump on both wide & close-up.

Exact same file set of images... 302 from a X4S I2 @ f11 (X4S is same camera on P4P, Mech Shutter up to 1/2000/s )
I own neither of the 2 programs, both are local installed. Exploring CaptureReality, purchased 30,000 PPI credits, and understood that provided a 'Fully' Functional version, but I've noticed the 2D Ortho have a "watermark" plastered all over, and the 3D model does not. Still exploring. The MetaShape, using a 30 day Full Functional Eval (each system can get a 30 day)
Things I've noticed: Detail of 2D is currently MS, but CR may have much more to tap once I learn more. It hints of much greater detail. The Color and EV & Contrast of CR is much better. The shadows, and overall brightness provide greater detail.
The blend of multiple photos and removing artifacts, moving objects (cars & people) are cleanly removed in CR, and removed Partially in MS.
Hole Filing is better in MS, but that is most likely me not knowing CR too.
On the 3D models... Both are auto mode, no tweaks or adjustments.
This is one area I felt was much stronger on CR, the NADIR shots normally give poor 3D results for any 1) Overhang, 2) Long non-color changing verticals, 3) narrow objects (ladders, cranes arms, etc), 4) vertical holes.
The lack of detail under overhangs is common in all the ones I've experimented with so far... but the CR is a few notches up. It's not useable detail, but it makes the biggest attempt to provide detail.
Example: 3D, look at the 2nd Floor foundation and the 1st Floor underneath. MS is a gapping unfilled hole. CR captures the first 2-4 feet under the overhang.
TIME to process -
On a Mac Pro 5,1 Dual Xeon 3.46 Mhz 6 Core / 24 thread processing, 128 GB RAM, GPU 1080Ti 12GB, Windows 10 v2004.
MME returns a completed message on avg for 280-350 photos in about 5-7 hrs.
MS 300 photo avg, takes about 5-6 hrs to process. (this project 5 hrs)
CR 300 photo avg, takes about 1-3 hrs to process. (this project 1 hr)
Metashape 2D -
CaptureReality 2D -
MapsMadeEasy -
MS 3D Model -
CR 3D Model -
Didn't grab a close up of CR, but examine the detail of MS close up on 2D...
This is the same 2D Ortho as the MS 2D at the top this stack of pics.
Locate the Crane shadow and stump on both wide & close-up.
Last edited:
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
I’ve not directly used DD, based on several examples and the flight paths applied would be my limited comparison. I remain impressed of the included features & reports within DD. The DD package provides high quality results, the limitation to me is cost compared to other options. The 2D ortho I think are equal and the 3D I feel CaptureReality has the greatest potential. But I remain hesitant which to purchase; both MS and RC have their strengths.Very Nice, How do you think all 3 software compare to DD?
I personally like the local processing option, the added features and control. But that does require some computing power too.
I just ran the same set of images in Drone Deploy, Pix4D Cloud, Pix4D Desktop and Capturing Reality and then made a 3D model. I didn't make any changes or try to adjust anything. Just upload and process.
Pix4D Cloud made useless garbage.
Pix4D Desktop made an ok model, but nothing that I would give to a client.
Drone Deploy made a really good model.
Capturing Reality made a very good model.
My pure opinion, question and guess is, Is Drone Deploy using Capturing Reality for their processing now? The models look very, very similar.
I used Capturing Reality to reprocess images from a model I did months ago, and it came out beautiful.
My biggest question is, how accurate is Capturing Reality? Pix4D has so much info as far as tests for accuracy. When I do go the route of adding GCP's and checkpoints and work with a surveyor, is CR going to stand up to Pix4D? Pix4D may suck at generating the mesh, but when done right its dense point clouds have proven through many tests to be very accurate.
Pix4D Cloud made useless garbage.
Pix4D Desktop made an ok model, but nothing that I would give to a client.
Drone Deploy made a really good model.
Capturing Reality made a very good model.
My pure opinion, question and guess is, Is Drone Deploy using Capturing Reality for their processing now? The models look very, very similar.
I used Capturing Reality to reprocess images from a model I did months ago, and it came out beautiful.
My biggest question is, how accurate is Capturing Reality? Pix4D has so much info as far as tests for accuracy. When I do go the route of adding GCP's and checkpoints and work with a surveyor, is CR going to stand up to Pix4D? Pix4D may suck at generating the mesh, but when done right its dense point clouds have proven through many tests to be very accurate.
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
I'd strongly agree, the more I experiment, the more RC is tops! In many other models I've seen , outside of aerial... RC is easily producing results above the rest. If you tweak the setting, it gets even better results.I just ran the same set of images in Drone Deploy, Pix4D Cloud, Pix4D Desktop and Capturing Reality and then made a 3D model. I didn't make any changes or try to adjust anything. Just upload and process.
Pix4D Cloud made useless garbage.
Pix4D Desktop made an ok model, but nothing that I would give to a client.
Drone Deploy made a really good model.
Capturing Reality made a very good model.
My pure opinion, question and guess is, Is Drone Deploy using Capturing Reality for their processing now? The models look very, very similar.
I used Capturing Reality to reprocess images from a model I did months ago, and it came out beautiful.
My biggest question is, how accurate is Capturing Reality? Pix4D has so much info as far as tests for accuracy. When I do go the route of adding GCP's and checkpoints and work with a surveyor, is CR going to stand up to Pix4D? Pix4D may suck at generating the mesh, but when done right its dense point clouds have proven through many tests to be very accurate.
Accuracy I doubt is a question. The point cloud and mesh easily exceed most computational capabilities... and their simplified computations aren't removing any accuracy, just reducing the number of triangles. Adding in GPC is direct matrix, not a calculated estimate.
Even in their example where they reduced the number of triangles to the point it effected the surface detail it still retained accuracy in points and the surface detail was restored with a texture overlay.
The companies that use RC are growing rapidly, I don't think that would be occurring if output accuracy was short.
On DD, hmmmm... I personally think RC can produce better results based on what I've examined.
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
Back to the EVO2 as a survey, map, modeler platform. I'm looking at the EVO2 Duo with possibly 2nd Camera. But the autonomous flight apps are minimal... which for a standard grid, overall not a big issue if battey swap and a few standard features are included.
The one area I found concerning on the DJI side was object avoidance when mapping. The OA is not functional within practically all mapping apps, which is why they all state to fly above all objects. Some will marginally prevent collision but also terminate the mission. None will fly around the object and continue the mission grid.
As example: On a construction site with center mounted Crane (195-300ft) flying above causes anomalies in multiple photos of the cranes horizontal beam sections and 2nd; a higher altitude than needed for initial ground details. Some Ag projects present similar conditions: silo, elevator, etc.
How does the EVO2's OA work on autonomous mission? I've heard the Skydio X2 will avoid and continue mission... very nice! But not obtainable for small shop.
To work around the problem requires multiple grid sections flown around & avoiding vertical & horizontal crane beams. But if not on map, you need to fly to crane and spot the crane location and then manually drawn out the remaining section to complete the grid.
The only App I've found able to do this is Ground Station Pro2. I can fly out to crane and place a few markers around crane, land and finish drawing the grids. Send it back up and fly 1st section, then move on to 2nd section.
The Pix4D app is probably the worst feature mapping app. What does the EVO2 app provide? Does OA work on mapping and if it does, it terminates the mission?
The one area I found concerning on the DJI side was object avoidance when mapping. The OA is not functional within practically all mapping apps, which is why they all state to fly above all objects. Some will marginally prevent collision but also terminate the mission. None will fly around the object and continue the mission grid.
As example: On a construction site with center mounted Crane (195-300ft) flying above causes anomalies in multiple photos of the cranes horizontal beam sections and 2nd; a higher altitude than needed for initial ground details. Some Ag projects present similar conditions: silo, elevator, etc.
How does the EVO2's OA work on autonomous mission? I've heard the Skydio X2 will avoid and continue mission... very nice! But not obtainable for small shop.
To work around the problem requires multiple grid sections flown around & avoiding vertical & horizontal crane beams. But if not on map, you need to fly to crane and spot the crane location and then manually drawn out the remaining section to complete the grid.
The only App I've found able to do this is Ground Station Pro2. I can fly out to crane and place a few markers around crane, land and finish drawing the grids. Send it back up and fly 1st section, then move on to 2nd section.
The Pix4D app is probably the worst feature mapping app. What does the EVO2 app provide? Does OA work on mapping and if it does, it terminates the mission?
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
@jaja6009 in looking a bit more at RC. I actually feel the accuracy "can" be higher in RC than Pix4D, but the biggest point of variance isn't the software, but the drone & camera.I just ran the same set of images in Drone Deploy, Pix4D Cloud, Pix4D Desktop and Capturing Reality and then made a 3D model. I didn't make any changes or try to adjust anything. Just upload and process.
Pix4D Cloud made useless garbage.
Pix4D Desktop made an ok model, but nothing that I would give to a client.
Drone Deploy made a really good model.
Capturing Reality made a very good model.
My pure opinion, question and guess is, Is Drone Deploy using Capturing Reality for their processing now? The models look very, very similar.
I used Capturing Reality to reprocess images from a model I did months ago, and it came out beautiful.
My biggest question is, how accurate is Capturing Reality? Pix4D has so much info as far as tests for accuracy. When I do go the route of adding GCP's and checkpoints and work with a surveyor, is CR going to stand up to Pix4D? Pix4D may suck at generating the mesh, but when done right its dense point clouds have proven through many tests to be very accurate.
When inputting the images, the metadata exif provides the geo referenced xyz data, to the accuracy of the camera timing and the drone's GPS, both not considered extremely accurate on prosumer drones... lower than RC or Pix4D computational variables.
Within the RC program are defaults that can be changed to pretty much any level of accuracy in both Camera accuracy & positional CP; again to the limitations of accuracy of drone or camera collecting.
A camera on a M2P, EVO2 or similar platform will not have the accuracy in metadata exif as a camera sync'ed or timed... such as a X4S modified & connected to RTK/PPK devices as a Emlid M2 onboard.
If the camera has a variance of 3cm (realistically much greater), a setting of 1CM within RC's camera accuracy won't be obtained. In addition, when using Control Points there are additional setting to increase the values within positional accuracy of CP too.
Once the Inputs are configured, and point cloud generated, additional CP accuracy can be entered and a higher accuracy point cloud can be generated.
My experience is Pix4D is low but I don't see this level of granularity, I think RC will be giving older established programs: Pix4d & Metashape a strong run in innovation & capabilities.

This is a very interesting post. I just left a survey company in Tampa and moved to Miami with my girlfriend. I have a M2P and an E2P and have done aerial surveys before. I also just got my Part 107. This post makes me want to approach some survey companies and offer my services, either as a contractor, or an employee. I do not have a Rover and Base though, so I wouldn't be able to get my errors down. (Curious why you used NTRIP with a base and rover if you could have just used a Rover and DOT network with NTRIP)
I just have a few questions.
Are you doing this for a survey company or providing this service as a contractor for companies?
Is there any demand for just the Ortho without precision from GPS instruments?
Where are you based out of?
I've been looking at other types of services that involve drone imaging and have consulted a few websites, looks like inspection jobs would benefit from these orthos as well, have you done that or mostly just plats?
Thanks for the post man, summoned some ideas.
OH and if anyone knows of any great survey companies in Miami/Fort Laudy, hit me up!
I just have a few questions.
Are you doing this for a survey company or providing this service as a contractor for companies?
Is there any demand for just the Ortho without precision from GPS instruments?
Where are you based out of?
I've been looking at other types of services that involve drone imaging and have consulted a few websites, looks like inspection jobs would benefit from these orthos as well, have you done that or mostly just plats?
Thanks for the post man, summoned some ideas.
OH and if anyone knows of any great survey companies in Miami/Fort Laudy, hit me up!
Dougcjohn
Well-Known Member
- Joined
- Apr 7, 2019
- Messages
- 187
- Reaction score
- 96
- Age
- 67
Welcome to forum... might also want to check out Commercial Drone Pilots... several map/survey/modeling discussions too.This is a very interesting post. I just left a survey company in Tampa and moved to Miami with my girlfriend. I have a M2P and an E2P and have done aerial surveys before. I also just got my Part 107. This post makes me want to approach some survey companies and offer my services, either as a contractor, or an employee. I do not have a Rover and Base though, so I wouldn't be able to get my errors down. (Curious why you used NTRIP with a base and rover if you could have just used a Rover and DOT network with NTRIP)
I just have a few questions.
Are you doing this for a survey company or providing this service as a contractor for companies?
Is there any demand for just the Ortho without precision from GPS instruments?
Where are you based out of?
I've been looking at other types of services that involve drone imaging and have consulted a few websites, looks like inspection jobs would benefit from these orthos as well, have you done that or mostly just plats?
Thanks for the post man, summoned some ideas.
OH and if anyone knows of any great survey companies in Miami/Fort Laudy, hit me up!
Regarding 2D Ortho demand, I’d say there’s quite a bit. Several use it to monitor the work progression, material deliveries, and to provide to their Clients / Future Owners of project or progression of time lapse. None of that requires survey accuracy or accuacy to point on earth. They can still obtain very close measurements of structure, volumetrics, landscaping plot dimensions relative to the structures within the 2D Ortho... everything is off ground accuracy points, but relatively accurate within image.
I provide 2D Ortho, and they prefer the simplistic access of product within MME and use the on-page tools to play with quick measurements and static 3D model poises. I’d like to get much more into the Base, Rover and On-board sUAV accurate collection and experienced the opposite in requests... lack of interest or desire to purchase the RTK/PPK product discourages my desire for the additional investment. Will purchase eventually just to experiment and learn Emlid or Loki hardware and be able to provide more services.
Similar threads
- Replies
- 0
- Views
- 348
- Replies
- 0
- Views
- 1K
- Replies
- 4
- Views
- 751


Latest threads
-
-
-
 Tripltek 9 - How to Prevent Charging EVO II Pro Controller?
Tripltek 9 - How to Prevent Charging EVO II Pro Controller?- Started by rangerb3
- Replies: 1
-
-
EVO Lite+ Controller connection issue after failed firmware update
- Started by SergeyBkL
- Replies: 2