

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Best Practices to Connect an Emlid Reach RS2 Base to an Autel Evo II Pro Enterprise RTK Drone
- Thread starter Malli35998
- Start date
- Joined
- May 9, 2021
- Messages
- 311
- Reaction score
- 153
- Age
- 69
- Location
- Kingwood, TX
- Website
- www.raptoraerialservices.com
can you post a single R-JPEG from the 640R? I would like to compare the metadata to the converted 640T
Attachments

- Joined
- May 9, 2021
- Messages
- 311
- Reaction score
- 153
- Age
- 69
- Location
- Kingwood, TX
- Website
- www.raptoraerialservices.com
I copied several more thermal IR images to Dropbox. See link below.







- Joined
- May 9, 2021
- Messages
- 311
- Reaction score
- 153
- Age
- 69
- Location
- Kingwood, TX
- Website
- www.raptoraerialservices.com
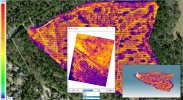
Response from OpenDroneMap (WebODM) Forum: "With the latest docker version (I don’t think this has been published to the Windows native version yet) you should be able to access the LWIR formulas for temperature from the “Plant Health” tab. Your orthophoto needs to have a LWIR band (typical in multispectral datasets) for the formula to show up."
- Joined
- May 9, 2021
- Messages
- 311
- Reaction score
- 153
- Age
- 69
- Location
- Kingwood, TX
- Website
- www.raptoraerialservices.com
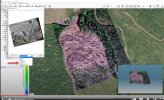
With regards to SimActive C3D. See
Customizing Your Multispectral Processing Workflow
See attached screen captures below. First attachment shows an example in the video from above. Note the LWIR band option. Even though the FLIR Boson 640 is a LWIR thermal camera. I am not sure this band is being output/saved in the Autel Thermal IR image format.Attachments
Last edited:
I recently purchased the EVO 2 RTK series v3 as a backup to my M300 and I process the data using Pix4dMapper. I use the Emlid RS2+ for my base setup on a known point and the RS2 for my rover, feed correction from the base through Emlid caster service to my rover and drone. This setup has worked pretty well for my M300. I've flown a couple of test site with the EVO and my elevations are all over the place after processing in Pix4d. I found out from Pix you have to manually set the vertical CS in the image editor for Pix when you import the images to Ellipsoid with a 0 offset, it's set to MSL EGM 96 by default. For the output CS I use either Texas central or Texas South central and ellipsoid for VCS and set my geoid offset there..typically between -83 and -85 ft. Changing the vertical CS in the images editor fixed the issue with my elevation being off by 90 to 100 ft but I'm still seeing issue with horizontal and vertical accuracy...anywhere from 6 ft at one site to .889 ft at another, horizontal is anywhere from .2ft to .6 compared to my GCP. I have a ticket open with Pix and Autel now just thought I'd try here see if anyone has had similar issues.
On your mapping mission settings it has PIX4D setting, did you have that on?I recently purchased the EVO 2 RTK series v3 as a backup to my M300 and I process the data using Pix4dMapper. I use the Emlid RS2+ for my base setup on a known point and the RS2 for my rover, feed correction from the base through Emlid caster service to my rover and drone. This setup has worked pretty well for my M300. I've flown a couple of test site with the EVO and my elevations are all over the place after processing in Pix4d. I found out from Pix you have to manually set the vertical CS in the image editor for Pix when you import the images to Ellipsoid with a 0 offset, it's set to MSL EGM 96 by default. For the output CS I use either Texas central or Texas South central and ellipsoid for VCS and set my geoid offset there..typically between -83 and -85 ft. Changing the vertical CS in the images editor fixed the issue with my elevation being off by 90 to 100 ft but I'm still seeing issue with horizontal and vertical accuracy...anywhere from 6 ft at one site to .889 ft at another, horizontal is anywhere from .2ft to .6 compared to my GCP. I have a ticket open with Pix and Autel now just thought I'd try here see if anyone has had similar issues.
elphtrooper
Well-Known Member
- Joined
- May 6, 2022
- Messages
- 176
- Reaction score
- 111
- Age
- 50
Dude, great tip. I have sworn that off so hard I forgot it was there. I don't even know exactly what it does, lol.On your mapping mission settings it has PIX4D setting, did you have that on?
Make sure you have a FIX on RTK in Smart controller. The Evo can take off without fix IF the top slider in RTK menu is off. It should be on, and you should not be able to take off without RTK FIX.I recently purchased the EVO 2 RTK series v3 as a backup to my M300 and I process the data using Pix4dMapper. I use the Emlid RS2+ for my base setup on a known point and the RS2 for my rover, feed correction from the base through Emlid caster service to my rover and drone. This setup has worked pretty well for my M300. I've flown a couple of test site with the EVO and my elevations are all over the place after processing in Pix4d. I found out from Pix you have to manually set the vertical CS in the image editor for Pix when you import the images to Ellipsoid with a 0 offset, it's set to MSL EGM 96 by default. For the output CS I use either Texas central or Texas South central and ellipsoid for VCS and set my geoid offset there..typically between -83 and -85 ft. Changing the vertical CS in the images editor fixed the issue with my elevation being off by 90 to 100 ft but I'm still seeing issue with horizontal and vertical accuracy...anywhere from 6 ft at one site to .889 ft at another, horizontal is anywhere from .2ft to .6 compared to my GCP. I have a ticket open with Pix and Autel now just thought I'd try here see if anyone has had similar issues.
elphtrooper
Well-Known Member
- Joined
- May 6, 2022
- Messages
- 176
- Reaction score
- 111
- Age
- 50
This is a good point but his errors in relativity would have been MUCH worse.Make sure you have a FIX on RTK in Smart controller. The Evo can take off without fix IF the top slider in RTK menu is off. It should be on, and you should not be able to take off without RTK FIX.
@anejojoe What were your camera movement residuals? Like this one from the DD report.

Yep, always check that I have fix before I take offMake sure you have a FIX on RTK in Smart controller. The Evo can take off without fix IF the top slider in RTK menu is off. It should be on, and you should not be able to take off without RTK FIX.
This is a good point but his errors in relativity would have been MUCH worse.
@anejojoe What were your camera movement residuals? Like this one from the DD report.
View attachment 15293

Probably not, didn't know there was a setting for that and I can't seem to find it.On your mapping mission settings it has PIX4D setting, did you have that on?
Last menu option all the way right, ET DATAProbably not, didn't know there was a setting for that and I can't seem to find it.

Similar threads
- Replies
- 0
- Views
- 663
- Replies
- 4
- Views
- 938
- Replies
- 4
- Views
- 2K
- Replies
- 3
- Views
- 1K


Latest threads
-
-
-
Seeking Recommendations for Custom Voiceover Solutions
- Started by nobes
- Replies: 1
-
We need your Autel evo 2 V1 6K rugged bundle.
- Started by Autel-euducational
- Replies: 1
-
Questions on original Evo 1 and the new app Autel Sky
- Started by jaja6009
- Replies: 0